
Microchip MPLAB X IDE에서 AVRDUDE를 이용하여 Mega 2560에 Hex file Uploading 하기
- Microchip MPLAB X IDE 환경에서 아두이노(Arduino) Mega 2560 보오드를 개발 보오드로 사용 하기 위한 준비
- MPLAB X IDE에서 실행 파일(Hex Format File)을 Up Load 하는 Tool(avrdude)을 사용 할 수 있게 설정 하기
- Mega 2560에 Uploading 하기
Microchip MPLAB® X IDE 환경에서 아두이노(Arduino) Mega 2560 보오드를 개발 보오드로 사용 하기 위하여는 MPLAB X 환경에서 개발한 프로그램의 실행 File(Hex Format File)을 Mega 2560에 Uploading 하는 Tool이 필요하다.
- Microchip MPLAB X IDE 환경에서 아두이노(Arduino) Mega 2560 보오드를 개발 보오드로 사용 하기 위한 준비
- Microchip MPLAB® X IDE를 설치 한다.
- 필요한 경우 Arduino 개발 환경 Tool(Arduino IDE)을 설치 한다.
- Arduino IDE를 설치하지 않는 경우에는 별도로 avrdude를 다운로드 하여 설치 하여야 한다.
- "avrdude(Arduino IDE)"를 다운로드 하여 적당한 위치에 저장 한다.
- 다운로드한 File에는 avrdude.exe과 avrdude.conf File이 포함되어 있다.
- c:\ 에 적당한 이름의 폴더를 만들고 다운로드한 avrdude.exe 과 avrdude.conf FIle의 복사 한다.
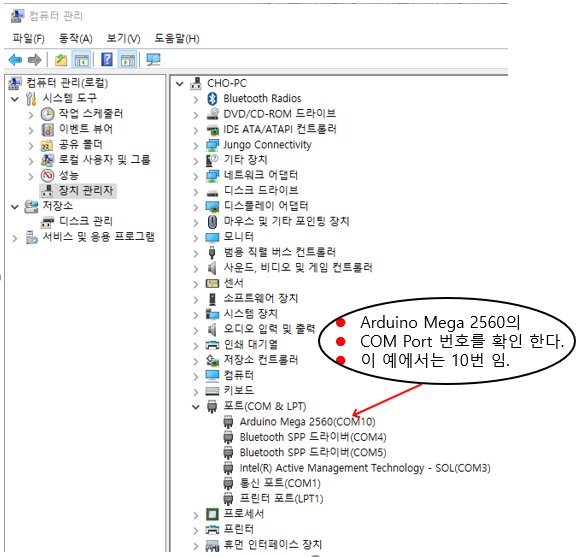
- Mega 2560 보오드를 연결 하고 장치 관리자에서 COM Port 번호를 확인 한다.
- MPLAB X IDE에서 실행 파일(Hex Format File)을 Up Load 하는 Tool(avrdude)을 사용 할 수 있게 설정 하기
- MPLAB X IDE를 실행 하고, "Projects 창"에서 "Project name"을 선택하고 마우스의 우측 버튼을 Click 하면, Project 관리 창이 열린다. 이 창에서 "Properties"를 Click 하면 "Project Properties" 창이 열린다.
- "Project Properties" 창에서 "Execute this line after build" Enable을 체크하고, Command Box에 Build 종료 후 실행할 명령(Hex 파일을 AVR에 Up Load 하는 프로그램)을 아래 예와 같이 입력한다.
- avrdude.exe File의 위치 예.
- Arduino를 C:\Program Files (x86)에 설치한 경우 avrdude.exe File의 경로 예
- Arduino를 설치 하지 않은 경우 avrdude.exe File의 경로 예는 아래와 같다.
- avrdude.conf File의 위치 예.
- Arduino를 C:\Program Files (x86)에 설치한 경우 avrdude.conf File의 경로 예
- Arduino를 설치 하지 않은 경우 avrdude.conf File의 경로 설정 예
- Command Box에 avrdude.exe, avrdude.conf File의 경로와 Arguments을 아래 예와 같이 입력 한다.
- Arduino를 설치한 경우 Command Box에 입력하는 명령 예
- Arduino를 설치 하지 않은 경우 Command Box에 입력하는 명령 예
- Mega 2560에 Uploading 하기
- 위와 같은 Build 옵션 설정으로 이제 Build 후 Hex File을 Upload 하는 명령이 자동으로 실행 되기 때문에 Build 명령을 실행하면 Build 후 Hex File이 자동으로 Upload 된다.
- 만약 Build 후 자동으로 Hex File이 Upload 되지 않도록 하려면 Project Properties" 창에서 "Execute this line after build" 명령을 Disable 하여야 한다.
참고자료: https://github.com/avrdudes/avrdude
C:\avrdude\ 폴더에 복사한 경우 예: C:\avrdude\avrdude.exe C:\avrdude\avrdude.conf
아래 그림의 예에서 COM Port 번호는 10 번 임.
C:\Users\chowk\AppData\Local\Arduino15\packages\arduino\tools\avrdude\6.3.0-arduino18\bin\avrdude.exe 이다.
C:\avrdude\avrdude.exe
C:\Users\chowk\AppData\Local\Arduino15\packages\arduino\tools\avrdude\6.3.0-arduino18\etc\avrdude.conf 이다.
C:\avrdude\avrdude.conf
C:\Users\chowk\AppData\Local\Arduino15\packages\arduino\tools\avrdude\6.3.0-arduino18\bin\avrdude.exe -v -C "C:\Users\chowk\AppData\Local\Arduino15\packages\arduino\tools\avrdude\6.3.0-arduino18\etc\avrdude.conf" -p atmega2560 -c wiring -P COM10 -D -U flash:w:$(ImagePath)
C:\avrdude\avrdude.exe -v -C "C:\avrdude\avrdude.conf" -p atmega2560 -c wiring -P COM10 -D -U flash:w:$(ImagePath)
주: $(ImagePath)는 Upload할 Hex file의 경로임.
아래 그림은 "Project Properties" 창에서 avrdude 사용을 위한 설정 예 이다.
